Режим дифференциальной коррекции
Уменьшить ошибку в измерении координат (до нескольких см) позволяет режим так называемой дифференциальной коррекции (DGPS Differential GPS).
Дифференциальный режим позволяет установить координаты с точностью до 5 м в динамической навигационной обстановке и до 2 м в стационарных условиях.
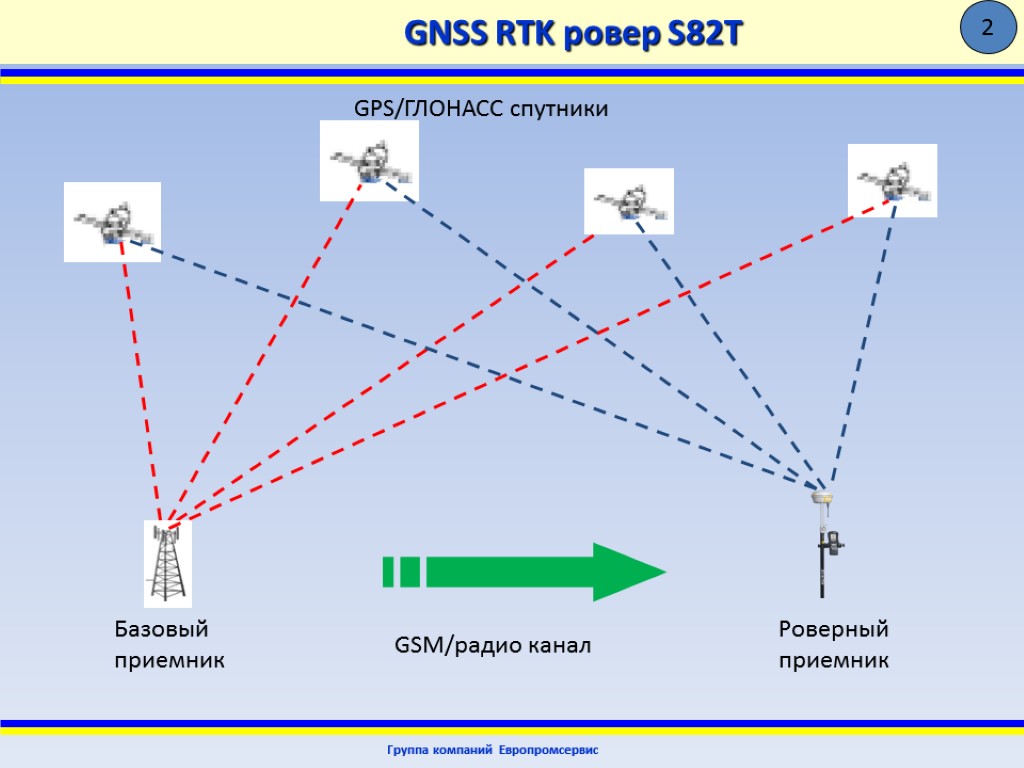
Дифференциальный режим реализуется с помощью контрольного GPS-приемника, называемого базовой станцией.
Она располагается в пункте с известными координатами в том же районе, что и GPS-приемник, и дает возможность одновременно отслеживать GPS-спутники.
В состав базовой станции входят: измерительный датчик GPS с антенной, процессор, приемник и передатчик данных с антенной.
Станция, как правило, использует многоканальный приемник GPS, каждый канал которого отслеживает один видимый спутник.
Необходимость непрерывного отслеживания каждого спутника обусловлена тем, что базовая станция должна захватывать навигационные сообщения раньше, чем приемники потребителей.
Сравнивая известные координаты (полученные в результате прецизионной геодезической съемки) с измеренными координатами, контрольный GPS-приемник вырабатывает поправки, которые передаются потребителям по радиоканалу в заранее оговоренном формате.
В свою очередь, потребителю необходим GPS-приемник с антенной, оснащенный процессором и дополнительным радиоприемником с антенной, который и позволяет получать дифференциальные поправки с базовой станции.
Поправки, принятые от базовой станции, автоматически вносятся в результаты собственных измерений пользовательских устройств.
Для каждого спутника, сигналы которого поступают на GPS-приемник, поправка, полученная от базовой станции, складывается с результатом измерения псевдодальности.
Коррекция может осуществляться как в режиме реального времени, так и при оффлайновой обработке данных (например, на компьютере).
Обычно в качестве базовой станции используется профессиональный GPS-приемник, принадлежащий какой-либо компании, специализирующейся на оказании услуг навигации или занимающейся геодезией.
Результаты, полученные с помощью дифференциального метода, в значительной степени зависят от расстояния между объектом и базовой станцией.
Применение этого метода наиболее эффективно, когда преобладающими являются систематические ошибки, обусловленные внешними (по отношению к приемнику) причинами (что обычно характерно для GPS-системы).
Погрешности S/А и уходы шкалы времени компенсируются в дифференциальном режиме полностью.
Погрешности из-за задержки сигналов в атмосфере зависят от идентичности условий прохождения сигналов к базовой станции и объекту, а, следовательно, от расстояния между ними.
Эти погрешности компенсируются полностью лишь при близком расположении базовой станции и объекта.
Эфемеридная погрешность также лучше всего компенсируется при небольшом удалении потребителя от базовой станции.
Вседствие всех этих причин базовую станцию рекомендуется располагать не далее 500 км от объекта.
Основными заказчиками дифференциальной коррекции обычно являются геодезические и топографические службы.
Для частного пользователя DGPS не представляет интереса из-за высокой стоимости и громоздкости оборудования.
Постобработка данных или Post-processing.
Иногда шутливо называемая «Poor Man DGPS» («DGPS для бедных»), на самом деле — эффективная высокоточная технология, широко используемая в геодезии. Используется пара специальных приемников GPS, имеющих возможность сохранять в памяти измеренные псевдодальности. После выполнения измерений на местности данные обоих приемников для каждого момента времени обрабатываются специальным программным обеспечением и на основании данных одного рассчитываются дифференциальные поправки для GPS-приемника. Это позволяет добиваться высокой относительной точности, до сантиметров.
Дифференциальная GPS.
Такая технология называется дифференциальной GPS, или DGPS. Разумеется, чем ближе приемник находится к эталонному месту, тем выше точность, поэтому дальность действия такой системы ограничена. Поправки передаются в специальном формате RTCM SC-104 (Radio Technical Commission for Maritime Services). В простейшем случае для передачи поправки используется радиомодем.
В зависимости от способов передачи создаются различные сети станций DGPS, как бесплатные, так и коммерческие, или корпоративные. Наиболее широко распространена бесплатная морская сеть DGPS, передающая поправки по радио на частотах 285—325 кГц. Изначально созданная береговой охраной США и Канады на базе бывших радиомаяков, она развернута вдоль побережий и внутренних водных путей многих стран.
Сетевая радионавигационная спутниковая система (СРНСС) Глонасс
Система Глонасс предназначена для глобальной оперативной навигации приземных подвижных объектов. СРНСС разработана по заказу Министерства Обороны. По своей структуре Глонасс так же, как и GPS, считается системой двойного действия, то есть может использоваться как в военных, так и в гражданских целях.
Система в целом включает в себя три функциональные части (в профессиональной литературе эти части называются сегментами) (рис. 1).
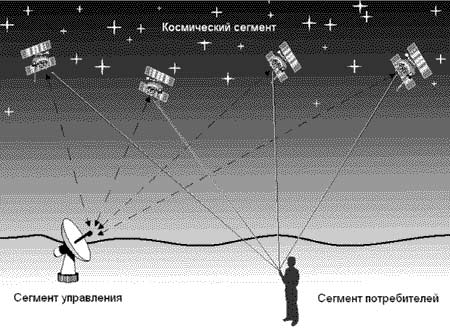 Рисунок 1. Сегменты высокоорбитальных навигационных систем Глонасс и GPS
Рисунок 1. Сегменты высокоорбитальных навигационных систем Глонасс и GPS
- космический сегмент, в который входит орбитальная группировка искусственных спутников Земли (иными словами, навигационных космических аппаратов);
- сегмент управления, наземный комплекс управления (НКУ) орбитальной группировкой космических аппаратов;
- аппаратура пользователей системы.
Из этих трёх частей последняя, аппаратура пользователей, самая многочисленная. Система Глонасс является беззапросной, поэтому количество потребителей системы не имеет значения. Помимо основной функции — навигационных определений, — система позволяет производить высокоточную взаимную синхронизацию стандартов частоты и времени на удалённых наземных объектах и взаимную геодезическую привязку. Кроме того, с её помощью можно производить определение ориентации объекта на основе измерений, производимых от четырёх приёмников сигналов навигационных спутников.
В системе Глонасс в качестве радионавигационной опорной станции используются навигационные космические аппараты (НКА), вращающиеся по круговой геостационарной орбите на высоте ~ 19100 км (рис. 2). Период обращения спутника вокруг Земли равен, в среднем, 11 часов 45 минут. Время эксплуатации спутника — 5 лет, за это время параметры его орбиты не должны отличаться от номинальных значений больше чем на 5%. Сам спутник представляет собой герметический контейнер диаметром 1,35 м и длиной 7,84 м, внутри которого размещается различного рода аппаратура. Питание всех систем производится от солнечных батарей. Общая масса спутника — 1415 кг. В состав бортовой аппаратуры входят: бортовой навигационный передатчик, хронизатор (часы), бортовой управляющий комплекс, система ориентации и стабилизации и так далее.
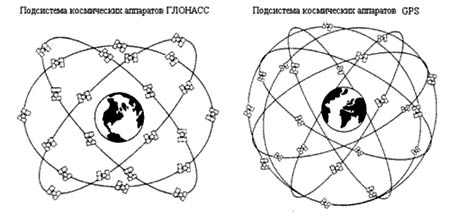 Рисунок 2. Космический сегмент систем ГЛОНАСС и GPS
Рисунок 2. Космический сегмент систем ГЛОНАСС и GPS
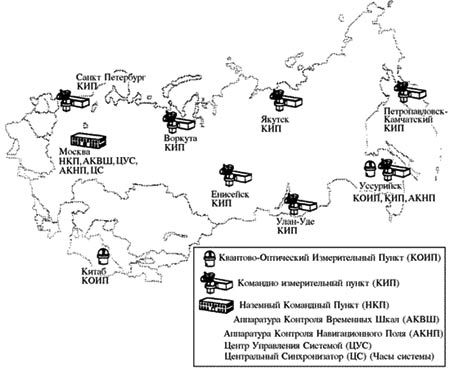 Рисунок 3. Сегмент наземного комплекса управления системы Глонасс
Рисунок 3. Сегмент наземного комплекса управления системы Глонасс
 Рисунок 4. Сегмент наземного комплекса управления системы GPS
Рисунок 4. Сегмент наземного комплекса управления системы GPS
Сегмент наземного комплекса управления системы ГЛОНАСС выполняет следующие функции:
- эфемеридное и частотно-временное обеспечение;
- мониторинг радионавигационного поля;
- радиотелеметрический мониторинг НКА;
- командное и программное радиоуправление НКА.
Для синхронизации шкал времени различных спутников с необходимой точностью на борту НКА используются цезиевые стандарты частоты с относительной нестабильностью порядка 10-13. На наземном комплексе управления используется водородный стандарт с относительной нестабильностью 10-14. Кроме того, в состав НКУ входят средства коррекции шкал времени спутников относительно эталонной шкалы с погрешность 3–5 нс.
Наземный сегмент обеспечивает эфемеридное обеспечение спутников. Это означает, что на земле определяются параметры движения спутников и прогнозируются значения этих параметров на заранее определённый промежуток времени. Параметры и их прогноз закладываются в навигационное сообщение, передаваемое спутником наряду с передачей навигационного сигнала. Сюда же входят частотно-временные поправки бортовой шкалы времени спутника относительно системного времени. Измерение и прогноз параметров движения НКА производятся в Баллистическом центре системы по результатам траекторных измерений дальности до спутника и его радиальной скорости.
Что такое ЭРА-ГЛОНАСС?
«ЭРА-ГЛОНАСС» — российская система экстренного реагирования при авариях и других чрезвычайных ситуациях на дороге, позволяющая в кратчайшие сроки проинформировать о происшествии службы экстренного реагирования. «ЭРА-ГЛОНАСС» работает на базе спутниковой системы ГЛОНАСС. В эксплуатацию комплекс был введен в 2015 году, а с 1 января 2017 года автопроизводители обязаны устанавливать данную систему на свои транспортные средства, выходящие на российский рынок. Данная система сокращает время реагирования при авариях и чрезвычайных ситуациях, что приводит к снижению числа смертельных исходов, травматизма на дорогах и повышению грузовых/пассажирских перевозок.

«ЭРА-ГЛОНАСС» включает в себя два компонента: инфраструктуру оператора (навигационно-информационная платформа, сеть передачи данных, сеть мобильного оператора) и устройства, которыми оборудуются транспортные средства. В случае дорожно-транспортного происшествия (система распознает различные типы столкновения – лобовое, боковое или удар сзади), устройство определяет степень тяжести аварии, местоположение пострадавшего автомобиля на основе данных спутников систем ГЛОНАСС и/или GPS, устанавливает связь с системой «ЭРА-ГЛОНАСС» и передает информацию об аварии. Сигнал обладает приоритетным статусом и передается через любого мобильного оператора с максимально сильным в данном месте сигналом. При этом, если сеть перегружена телефонными звонками, они могут быть прерваны для передачи сигнала.
Для вызова помощи вручную в автомобилях с поддержкой «ЭРА-ГЛОНАСС» предусмотрена кнопка SOS, позволяющая связаться со специалистом колл-центра и сообщить об аварии. В случае подтверждения информации голосом или при отсутствии ответа оператор направляет службы экстренного реагирования (спасателей, карету Скорой помощи и ГИБДД). Система автоматически совершает вызов при срабатывании одной или нескольких подушек безопасности.
Система развернута в 83 субъектах РФ, для связи с экстренными центрами приема зарезервированы телефонные коды 941-949 и выделена первая серия номеров (941-111-1ххх). Деятельность контакт-центра обеспечивает «дочка» «Ростелекома» — «Ростелеком Контакт-центр».
Аналогом «ЭРА-ГЛОНАСС» является общеевропейская система eCall, с которой первая технологически совместима. Аналоги российской системы существуют и в других странах мира. В США это Е911, которая была запущена в 2001 году, в Японии – действующая с 1980-х годов интеллектуальная транспортная система (ECall), предназначенная для полной автоматизации управления дорожным движением, в Бразилии – SIMRAV. В Казахстане ведутся работы над проектом «ЭВАК» (экстренный вызов при авариях и катастрофах), который планируется запустить в 2018 году.
- Космические скорости: насколько быстро нужно лететь, чтобы покинуть Землю, планетную систему и галактику?
- Виды футбола: 15 популярных разновидностей игры, о которых вы могли даже не слышать.
- Человек с расставленными руками Леонардо да Винчи: в чем смысл картины?
Общие принципы определения координат
Основной принцип работы «завязан» на радиоволнах, посылаемых спутниками с постоянной скоростью
Здесь также важно время, за которое сигнал дойдет от источника к приемнику. Оно определяется атомарными часами на космическом аппарате
Скорость, время и расположение спутников позволяют вычислить их расстояние до человека, которому требуется навигация.
Пересечение сигнала 4 и более спутников позволяет с минимальной погрешностью определить, где находится человек. Некоторые программы навигации также учитывают расстояние до вышек сотовой связи, данные встроенного компаса и акселерометра и даже скорость движения того, кто запрашивает координаты. Но какие бы технологии ни использовались, есть много факторов, влияющих на работу позиционирования.



Орбиты спутников GPS и GLONASS
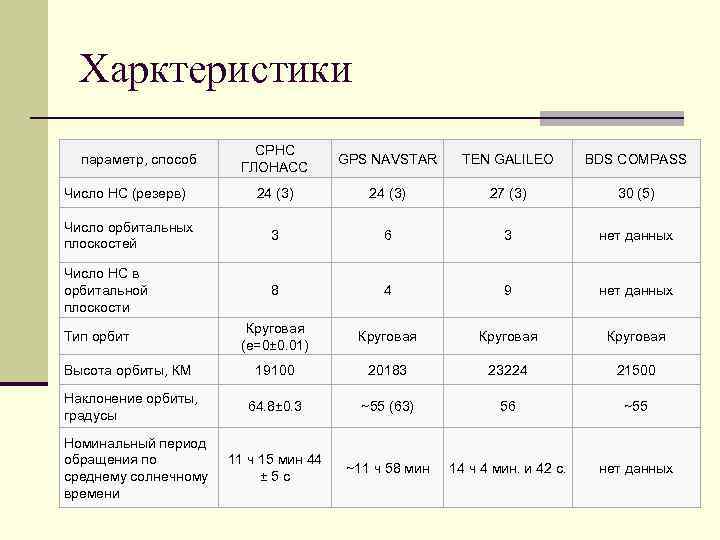
Спутниковые системы мониторинга
Существует множество вариантов систем мониторинга со спутника, например, Galileo (европейская), BeiDou (китайская). Но из-за популярности и точности определения координат больше используются американская GPS и российская «ГЛОНАСС», поэтому стоит провести их сравнение.
Спутниковые системы
GPS
При ориентировании с использованием навигационных систем происходит передача сигнала на GPS спутник от модуля, встроенного в электронное устройство (например, телефон). Космический аппарат «отвечает», показывает, где находится человек. Однако тоннели, помещения и облачность вносят коррективы в точность позиционирования, иногда делая ее просто невозможной.
ГЛОНАСС
«ГЛОНАСС» – это российский аналог всемирно известной GPS. Принцип работы тот же – смартфон отправляет сигнал на один из 24 спутников, те передают местоположение.
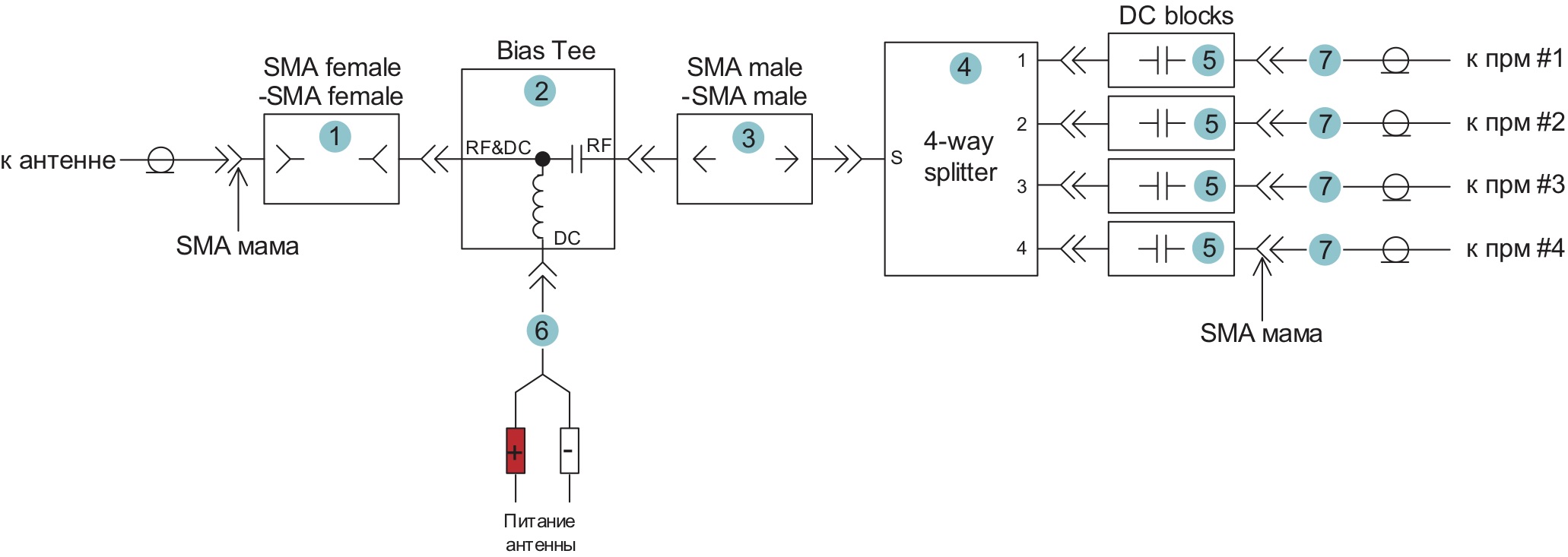
Состав оборудования подвижного приемника
- Антенна.
- Навигационный приемник.
- Модуль связи.
- Процессор обработки данных (опционально).
- Источник питания (аккумулятор).
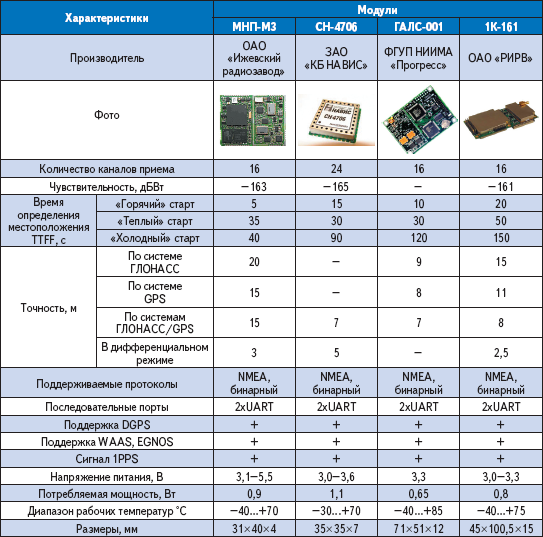
С учетом современных ценовых тенденций самое дорогое в таком комплекте — антенна (цена может доходить до $30–50). При этом однодиапазонный навигационный приемник и модуль связи стоит не более $12–15 каждый (например, в данной ценовой категории находится навигационный модуль NAVIA ML8089F-CP ) (рис. 3). Аккумулятор обойдется приблизительно в $30. Все остальное, вместе с корпусом, примерно $25. Итого чуть более $100 — стандартная цена устройства спутникового мониторинга. Большая нагрузка ложится на серверную часть такой системы, ведь именно там решается навигационная задача.

Рис. 3. Модуль NAVIA ML8089F-CP 13×15 мм и отладочная плата NAVIA ML8089F-CP-DEMO
Все это выглядит немного непривычно с точки зрения простоты и функциональности. Но любая новая технология, особенно когда она приходит к рядовому потребителю, выглядит почти фантастикой. Будем надеяться, что и данная технология в самом скором времени станет привычной и совершенно необходимой в повседневной жизни.
Статья была опубликованна в журнале «Беспроводные технологии» №3’18.
Космический сегмент
Основой системы являются навигационные спутники, движущиеся вокруг Земли по 6 круговым орбитальным траекториям (по 4 спутника в каждой), на высоте примерно 20180 км. Спутники излучают открытые для использования сигналы в диапазонах: L1=1575,42 МГц и L2=1227,60 МГц (начиная с Блока IIR-M), а модели IIF будут излучать также на L5=1176,45 МГц . Навигационная информация может быть принята антенной (обычно в условиях прямой видимости спутников) и обработана при помощи GPS-приёмника.
Сигнал с кодом стандартной точности (C/A код — модуляция BPSK(1)), передаваемая в диапазоне L1 (и сигнал L2C (модуляция BPSK) в диапазоне L2 начиная с аппаратов IIR-M), распространяется без ограничений на использование. Первоначально используемое на L1 искусственное загрубление сигнала (режим селективного доступа — SA) с мая 2000 года отключен. С 2007 года США окончательно отказались от методики искусственного загрубления. Планируется с запуском аппаратов Блок III введение нового сигнала L1C (модуляция BOC(1,1)) в диаппазоне L1. Для военных пользователей дополнительно доступны сигналы в диапазонах L1/L2, модулированные помехоустойчивым криптоустойчивым P(Y) кодом (модуляция BPSK(10)). Начиная с аппаратов IIR-M введен в эксплуатацию новый М-код (используется модуляция BOC(15,10)). Использование М-кода позволяет обеспечить функционирование системы в рамках концепции Navwar (навигационная война).
24 спутника обеспечивают 100% работоспособность системы в любой точке земного шара, но не всегда могут обеспечить уверенный приём и хороший расчёт позиции. Поэтому, для увеличения точности позиционирования и резерва на случай сбоев, общее число спутников на орбите поддерживается в большем количестве (31 аппарат в марте 2010 года).
Незапущенный спутник, экспонирующийся в музее. Вид со стороны антенн.
Сетевая радионавигационная спутниковая система GPS
Американская система GPS по своим функциональным возможностям аналогична отечественной системе Глонасс. Её основное назначение — высокоточное определение координат потребителя, составляющих вектора скорости, и привязка к системной шкале времени. Аналогично отечественной, система GPS разработана для Министерства Обороны США и находится под его управлением. Согласно интерфейсному контрольному документу, основными разработчиками системы являются:
- по космическому сегменту — Rockwell International Space Division, Martin Marietta Astro Space Division;
- по сегменту управления — IBM, Federal System Company;
- по сегменту потребителей — Rockwell International, Collins Avio-nics & Communication Division .
Как и система Глонасс, GPS состоит из космического сегмента, наземного командно-измерительного комплекса и сегмента потребителей.
Как было сказано выше, орбитальная группировка GPS состоит из 28 навигационных космических аппаратов. Все они находятся на круговых орбитах с периодом обращения вокруг Земли, равным 12 часам. Высота орбиты каждого спутника равна ~ 20000 км. НКА системы GPS проходили ряд усовершенствований, которые сказывались на их характеристиках в целом. В табл. 1 приведены краткие характеристики космических аппаратов, используемых в системе.
Таблица 1. Характеристики космических аппаратов, используемых в системе GPS
| Тип НКА | Масса на орбите | Мощность энергоисточников, Вт | Расчётный срок активного существования | Год запуска первого НКА |
| Блок-I | 525 | 440 | — | 1978 |
| Блок-II | 844 | 710 | 5 | 1989 |
| Блок-IIR | 1094 | 1250 | 7,5 | 1997 |
| Блок-IIF | — | — | 14–15 | 2001–2002 |
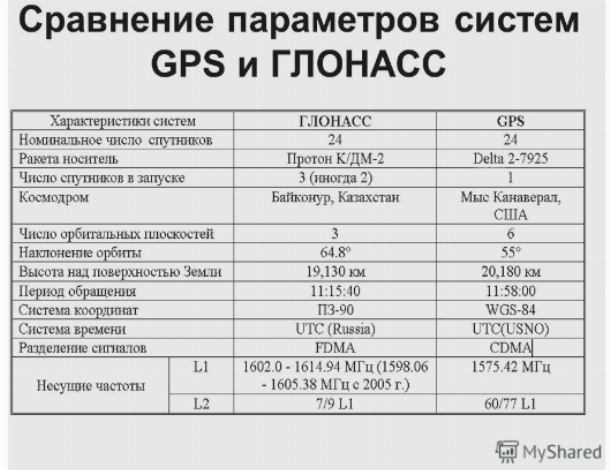
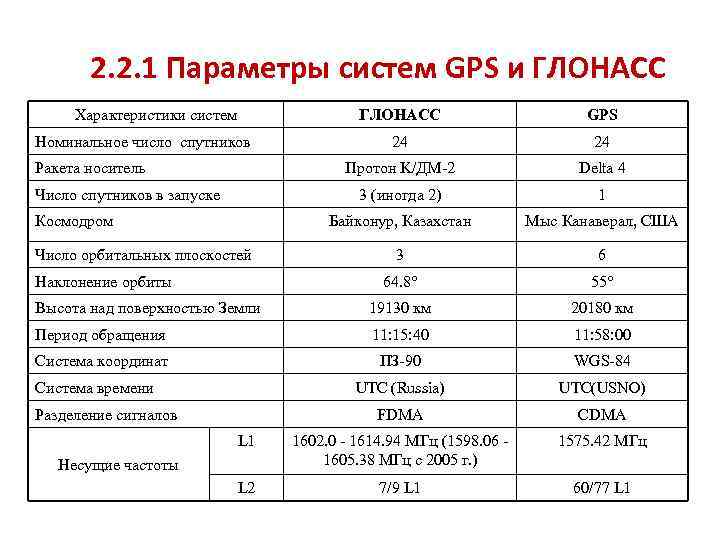
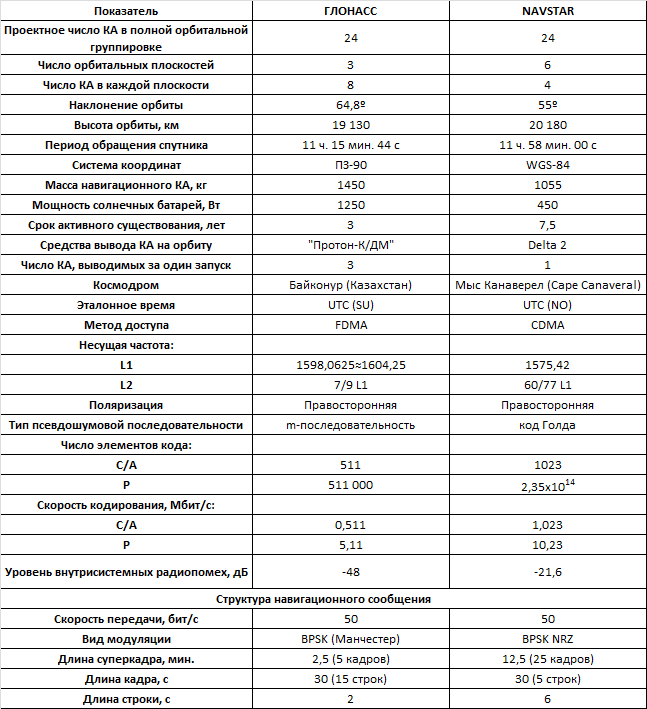
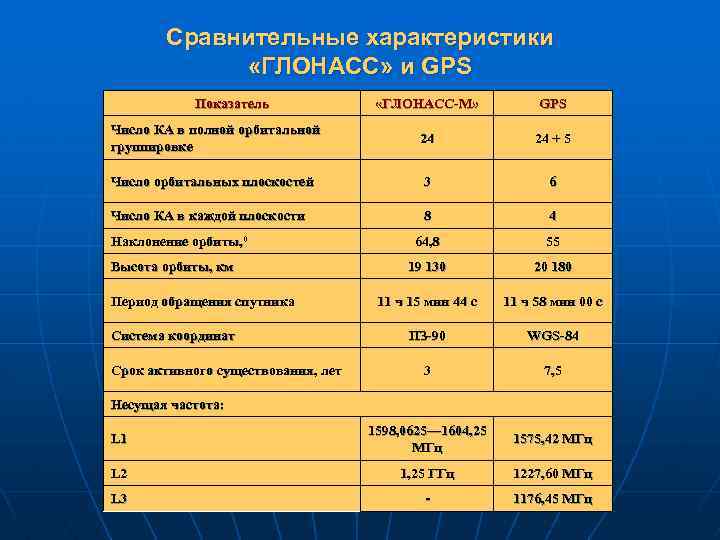
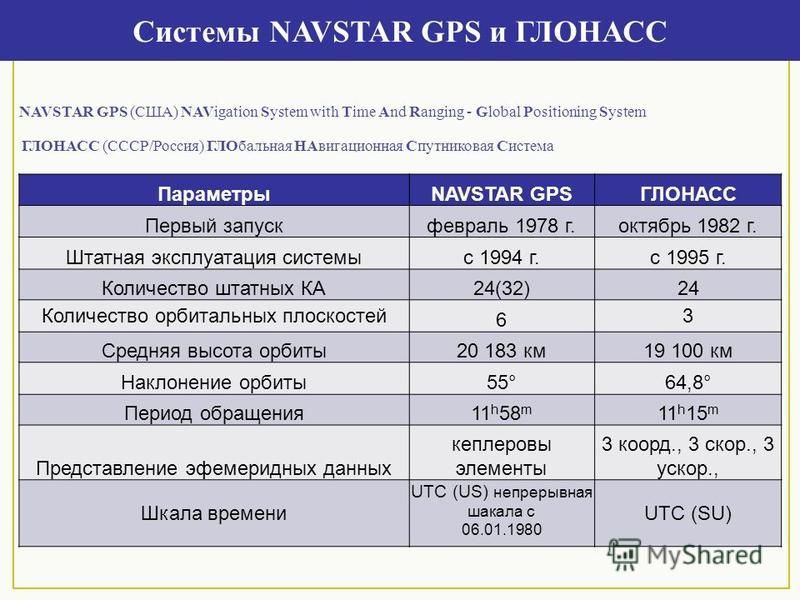
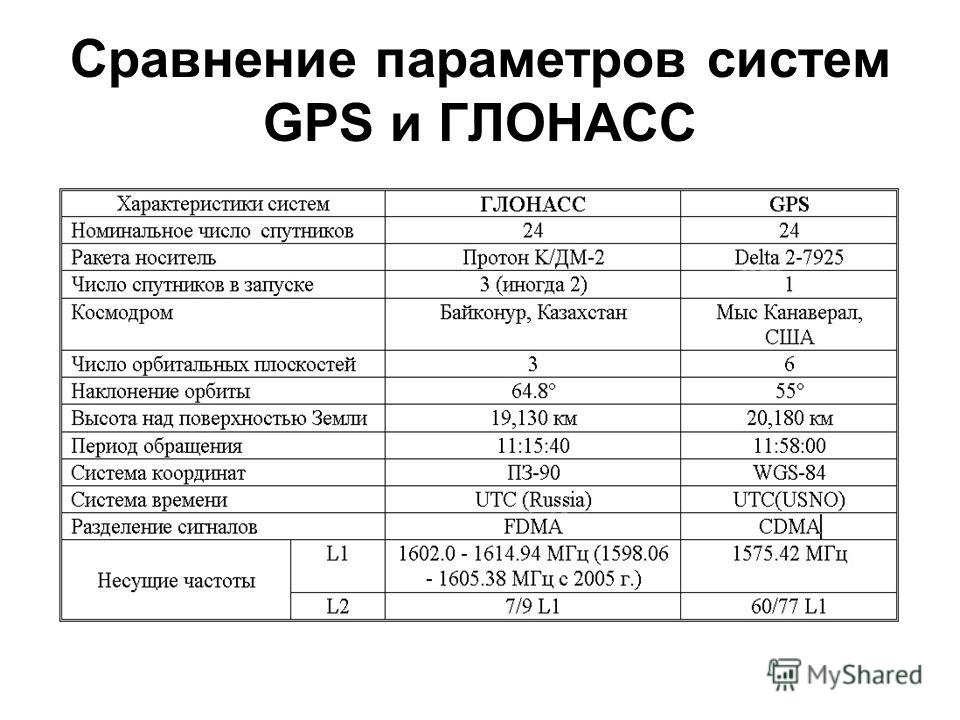
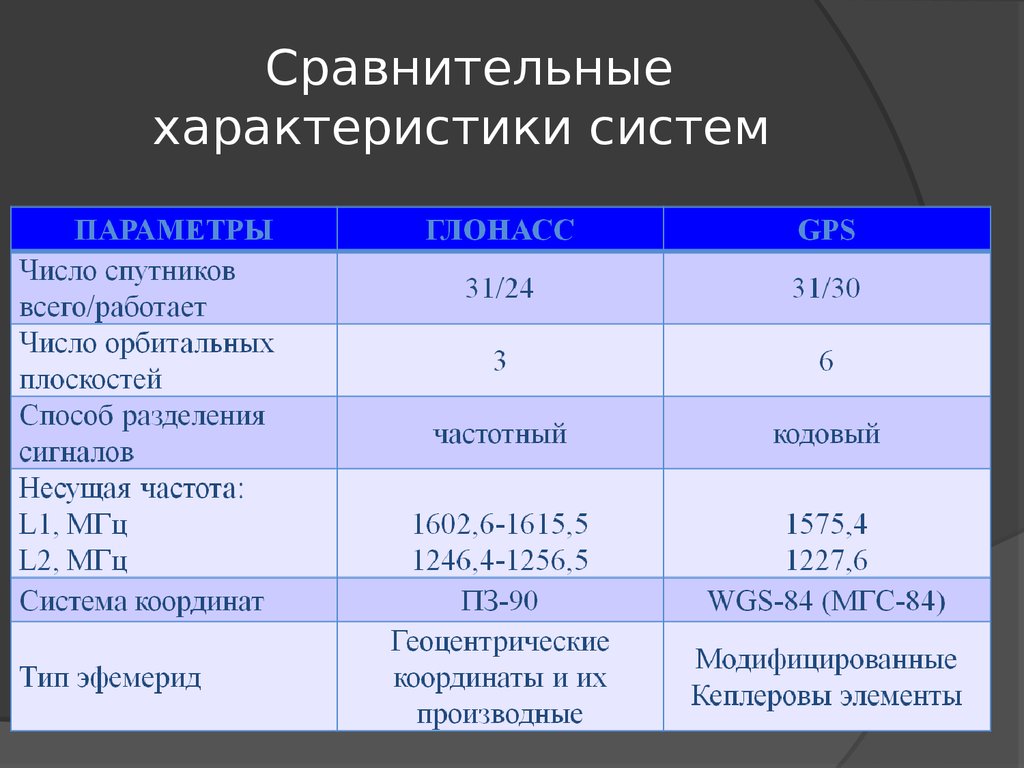
Таблица 2. Сравнительные характеристики систем ГЛОНАСС и GPS
| Показатель | ГЛОНАСС | GPS |
| Число КА в полной орбитальной группировке | 24 | 24 |
| Число орбитальных плоскостей | 3 | 6 |
| Число КА в каждой плоскости | 8 | 4 |
| Наклонение орбиты | 64,8º | 55º |
| Высота орбиты, км | 19 130 | 20 180 |
| Период обращения спутника | 11 ч. 15 мин. 44 с | 11 ч. 58 мин. 00 с |
| Система координат | ПЗ-90 | WGS-84 |
| Масса навигационного КА, кг | 1450 | 1055 |
| Мощность солнечных батарей, Вт | 1250 | 450 |
| Срок активного существования, лет | 3 | 7,5 |
| Средства вывода КА на орбиту | «Протон-К/ДМ» | Delta 2 |
| Число КА, выводимых за один запуск | 3 | 1 |
| Космодром | Байконур (Казахстан) | Мыс Канаверел (Cape Canaveral) |
| Эталонное время | UTC (SU) | UTC (NO) |
| Метод доступа | FDMA | CDMA |
| Несущая частота:L1L2 | 1598,0625—1604,257/9 L1 | 1575,4260/77 L1 |
| Поляризация | Правосторонняя | Правосторонняя |
| Тип псевдошумовой последовательности | m-последовательность | код Голда |
| Число элементов кода:C/AP | 51151 1000 | 10232,35×1014 |
| Скорость кодирования, Мбит/с:C/AP | 0,5115,11 | 1,02310,23 |
| Уровень внутрисистемных радиопомех, дБ | -48 | -21,6 |
| Структура навигационного сообщения | ||
| Скорость передачи, бит/с | 50 | 50 |
| Вид модуляции | BPSK (Манчестер) | BPSK NRZ |
| Длина суперкадра, мин. | 2,5 (5 кадров) | 12,5 (25 кадров) |
| Длина кадра, с | 30 (15 строк) | 30 (5 строк) |
| Длина строки, с | 2 | 6 |
При проектировании системы в целом и НКА в частности, большое внимание уделяется вопросам автономного функционирования. Так, космические аппараты первого поколения (Блок-I) обеспечивали нормальную работу системы (имеется в виду, без существенных ошибок определения координат) без вмешательства сегмента управления в течение 3–4 дней
В аппаратах Блок-II этот срок был увеличен до 14 дней. В новой модификации НКА Блок-IIR позволяет автономно работать в течение 180 дней без корректировки параметров орбиты с земли, пользуясь лишь автономным комплексом взаимной син-хронизации спутников. Аппараты Блок-IIF предполагается использовать взамен отработавших Блок-IIR.
Формат передачи данных RTCM 3
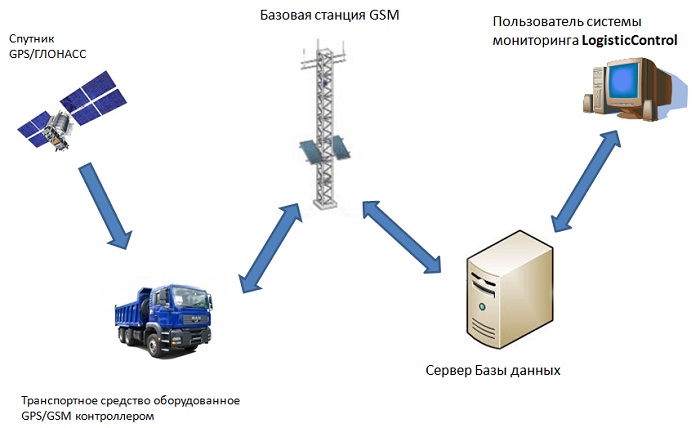
В формате RTCM 3 обычно передаются фактически не сами корректирующие данные, как в DGPS, а данные измерений сигналов каждого спутника в каждом поддерживаемом им диапазоне, например GPS L1 и L2. Формат сообщений RTCM 3 обеспечивает хорошее сжатие информации за счет ее оптимальной компоновки, также поток может быть сжат дополнительно с помощью любого алгоритма сжатия. В одном сообщении могут содержаться данные по нескольким сигналам одного или всех видимых спутников (MSM-сообщения или Multi Signal Message), также могут передаваться эфемериды раздельно для каждой навигационной системы и служебные сообщения, скажем, координаты базовой станции. В принципе потоки подвижного приемника и базовой станции по структуре одинаковы — это просто измерения приемников. При работе в режиме коррекции с применением базовой станции в одной точке должны собраться два потока RTCM 3 — от мобильного приемника и базовой станции

Причем неважно, где эта точка: на базовой станции, на мобильном приемнике или вдали от них. Два потока просто обеспечивают совместное решение навигационной задачи в специализированном программном обеспечении, обычно с получением потока NMEA на выходе, причем если поток NMEA получается на мобильном приемнике — это самый невыгодный вариант, поскольку при мониторинге подвижных объектов его нужно передавать обратно на пункт наблюдения в дополнение к получению потока от базовой станции
Если получение высокоточной позиции на самом мобильном приемнике не нужно, выгоднее передавать от него на пункт наблюдения потока RTCM 3 (рис. 1). При этом обычно на самом мобильном приемнике можно получать и его собственное нескорректированное решение в потоке NMEA. В ряде случаев поток данных RTCM 3 или в собственном формате приемника можно просто записывать и после преобразования в формат RINEX применять постобработку на сервисе постобработки (например, trimblertx.com) или в специальных программах (в частности, RTKLib).

Рис. 1. Потоки данных при получении навигационного решения на стороне базовой станции
RAIM-Receiver Autonomous Integrity Monitoring.
Приемник с автономным контролем непрерывности навигации. Эта технология не повышает точность навигации, а лишь позволяет собственными средствами GPS-приемника обнаружить недостоверный сигнал спутника GPS. Для этого приемник использует избыточное количество спутников сверх необходимых четырех и вычисляет среднюю позицию по данным разных созвездий спутников.
Спутники, данные которых заметно отличаются от средних значений, игнорируются. Этой возможностью обладают практически все современные стационарные авиационные GPS-приемники, в том числе для малой авиации. Избыточное количество спутников также может использоваться для дополнительной коррекции атмосферной рефракции в одночастотных GPS-приемниках.
По материалам книги Все о GPS-навигаторах. Найман В.С., Самойлов А.Е., Ильин Н.Р., Шейнис А.И.
Будущие решения
По различным методам, которые могут улучшить спутниковое позиционирование, проводится довольно много исследований: разработка более точных атомных часов, повышение устойчивости к сцинтилляции, внедрение более эффективных вычислений – это всего лишь несколько из них.
Для арктических приложений было предложено много решений. Одним из таких решений является реализация многоканальных частот L-диапазона в системах спутниковой навигации. Это позволит получать больше данных для расчета местоположения и поможет преодолеть ионосферные помехи, если используется несколько частот.
Инерциальные навигационные системы (INS) также могут быть сопряжены со спутниковой навигацией, что может компенсировать пробелы в данных во время сцинтилляции. Тем не менее, INS обладают склонностью испытывать трудности в поддержании точного направления, но это несущественно, если сцинтилляционные нарушения происходят в относительно коротких всплесках.
Наконец, для повышения точности GPS в Арктике также может быть реализовано увеличение спутниковых созвездий на средних орбитах Земли. Системы расширения, такие как Wide Area Augmentation System (WAAS) в США, используются в дополнение к GPS для обеспечения еще более точных данных позиционирования, в особенности, они адаптированы для авиации.
Структура навигационных радиосигналов системы Глонасс
В системе Глонасс используется частотное разделение сигналов (FDMA), излучаемых каждым спутником — двух фазоманипулированных сигналов. Частота первого сигнала лежит в диапазоне L1 ~ 1600 МГц, а частота второго — в диапазоне L2 ~ 1250 МГц. Номинальные значения рабочих частот радиосигналов, передаваемых в диапазонах L1 и L2, определяются выражением:
где k = 0,1,…,24 — номера литеров (каналов) рабочих частот спутников;
Для каждого спутника рабочие частоты сигналов в диапазоне L1 и L2 когерентны и формируются от одного эталона частоты. Отношение рабочих частот несущей каждого спутника:
Номинальное значение частоты бортового генератора, с точки зрения наблюдателя, находящегося на поверхности Земли, равно 5,0 MГц.
В диапазоне L1 каждый спутник системы Глонасс излучает 2 несущие на одной и той же частоте, сдвинутые друг относительно друга по фазе на 90º (рис. 5).
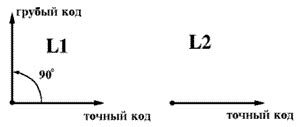 Рисунок 5. Векторная диаграмма несущих сигналов систем ГЛОНАСС и GPS
Рисунок 5. Векторная диаграмма несущих сигналов систем ГЛОНАСС и GPS
Одна из несущих подвергается фазовой манипуляции на 180º. Модулирующий сигнал получают сложением по модулю 2 трёх двоичных сигналов (рис. 6):
- грубого дальномерного кода, передаваемого со скоростью 511 Кбит/с (рис. 6в);
- последовательности навигационных данных, передаваемых со скоростью 50 бит/с (рис. 6а);
- меандрового колебания, передаваемого со скоростью 100 бит/с (рис. 6б).
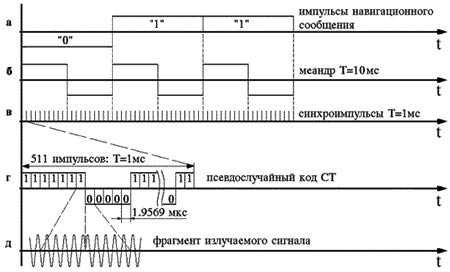 Рисунок 6. Структура сигнала ГЛОНАСС
Рисунок 6. Структура сигнала ГЛОНАСС
Сигнал в диапазоне L1 (аналогичен C/A-коду в GPS) доступен для всех потребителей в зоне видимости КА. Сигнал в диапазоне L2 предназначен для военных нужд, и его структура не раскрывается.
Какая система навигации лучше
Национальные операторы наземных станций слежения разных стран отмечают, что в определенных широтах одна система работает лучше другой. Например, в северных широтах ГЛОНАСС может быть точнее, чем GPS, а в южноафриканских — наоборот.
Под эти утверждения подводится техническая база, но все специалисты вынуждены согласиться, что точность позиционирования и стабильность сигнала зависят от множества факторов. В их числе:
- Положение спутников по отношению к пользователю, их количество и «видимость». Например, из-за особенностей расположения спутников в северных широтах лучше работает ГЛОНАСС, в то время как GPS в Арктическом регионе дает сбои.
- Класс и качество навигационного оборудования пользователя.
- Наличие/отсутствие помех на частотах навигационных радиосигналов.
К примеру, в ИАЦ ГЛОНАСС отмечают, что с нестабильностью приема любой навигационной системы или полным отсутствием сигнала со спутника можно столкнуться в лесу с деревьями с густой кроной, на подземных паркингах, в многоэтажной застройке, в конструкциях, построенных с использованием железобетонных плит.
Так что же все-таки лучше для рядового пользователя? ГЛОНАСС или GPS? А может, Galileo или Beidou? На этот вопрос убедительно ответили российские и китайские специалисты во время межгосударственных испытаний спутниковой навигационной доступности «Шелковый путь».
В ходе исследования испытывались различные навигационные приборы, а заодно проверялась точность навигационной информации (без корректировки с наземных станций) систем ГЛОНАСС, GPS, Beidou и Galileo в десятках городов РФ и КНР, от Выборга и до юго-восточных провинций Китая.
По результатам исследований на территории РФ можно сделать следующие выводы:
- На многих участках, даже в европейской части РФ, Galileo не могла предоставить навигационную информацию из-за того, что среднее количество видимых КА было меньше четырех. За Уралом рассчитывать на Galileo и вовсе не приходится.
- У Beidou на территории РФ в среднем результаты хуже, чем у ГЛОНАСС и GPS.
- Самая большая точность при определении плановых координат, высоты и времени достигалась при использовании двух-трех систем: ГЛОНАСС-GPS, ГЛОНАСС-Beidou, ГЛОНАСС-GPS-Beidou.
Возможно, вам также будет интересно
Зеленоградскими предприятиями ОАО НПЦ «ЭЛВИС» и ОАО «АНГСТРЕМ-Т» при участии ООО «НЕЛС» разработана и освоена в серийном производстве новая система на кристалле — сигнальный процессор 1892ВМ10Я со встроенной функцией ГЛОНАСС/GPS-навигации и пониженным энергопотреблением.
Микросхема является продолжением серии многоядерных сигнальных процессоров «МУЛЬТИКОР» и обеспечивает совместимость снизу по …
Компания Agilent Technologies объявила о добавлении новой возможности выполнения нескольких измерений в программное обеспечение векторного анализа сигналов 89600 VSA. Теперь можно одновременно анализировать несколько несущих и форматов сигнала, повышая эффективность тестирования беспроводного оборудования.
Исследователям и производственным инженерам, работающим в области беспроводной связи, …
Компания iRZ ведет разработки роутеров нового поколения. В этом году iRZ уже представила две новые модели семейства RUH — роутеры RUH2b и RUH3. А в следующем году готовится еще более значительное расширение линейки этих устройств.
RU10w, RU11w и RL21w — компактные Wi-Fi роутеры с поддержкой 3G (модели RU) и LTE (модель RL), которые оптимальны для торговых терминалов и банкоматов, узлов …
Триангуляция
В основе GPS лежит идея триангуляции точки в пространстве. Чтобы было проще, начнём издалека.




Чтобы определить положение точки в пространстве, достаточно знать расстояние от неё до трёх других точек с заранее известными координатами. В геодезии и радиосвязи это называется триангуляция — когда мы по координатам трёх точек можем вычислить, где находится четвёртая (наша). В сотовых телефонах без GPS-модуля это работает так:
- Сотовый телефон ловит сигналы от трёх вышек радиосвязи.
- В этих сигналах передаются, в числе прочего, координаты самих вышек.
- Телефон замеряет время, за которое проходит сигнал до каждой вышки.
- На основе этого времени высчитывает координаты своего местоположения с точностью 10–20 метров.
Теперь, когда мы знаем основную идею, переходим к спутникам.




